可微渲染入门笔记
本文讨论了可微渲染的入门,主体是 SIGGRAPH 2020 的 Differentiable Rendering Course 的阅读笔记。
这一笔记来自 SIGGRAPH 2020 的一篇 Course,Physics-based differentiable rendering: from theory to implementation. 笔记主要记了一下其中的理论推导部分,反正我目前没做可微渲染,后面具体上渲染方程的部分可以再看。
关于渲染的自动微分还可以看李子懋老师 2021 年的一篇 SIGGRAPH 文章 Systematically Differentiating Parametric Discontinuities,作者实现了一个用于 autodiff 的 Python DSL 为什么大家都这么喜欢 Python,可能对于 Luisa IR 的 autodiff 有帮助。
什么是可微渲染
给定所有参数 \(\mathbb\pi\), 渲染得到图像 \(I(\mathbf\pi)\), 与真实图像的 Loss 函数为 \(L\), 那么可微渲染的目标就是计算 \(\nabla_{\mathbf\pi}L(I(\mathbf\pi))\),从而使用基于梯度的方法优化渲染结果来实现逆向渲染。
对于 \(\mathbf{\pi}\) 中的任何一个参数 \(\pi\),我们都有 $$ \frac{\partial}{\partial\pi}L(I(\mathbf\pi)) = \sum_i\frac{\partial L}{\partial I_i(\mathbf{\pi})}\frac{\partial I_i(\mathbf{\pi})}{\partial\pi} $$ 前者是简单的,譬如对最基本的 MSE Loss,有 $$ L = \left(I(\mathbf\pi) - \hat I(\mathbf\pi)\right)^2 $$
$$ \frac{\partial L}{\partial I(\mathbf{\pi})} = 2\left(I(\mathbf\pi) - \hat I(\mathbf\pi)\right) $$
问题在于计算后者 \(\frac{\partial I_i(\mathbf{\pi})}{\partial\pi}\)
能不能把渲染「无痛」地变可微?
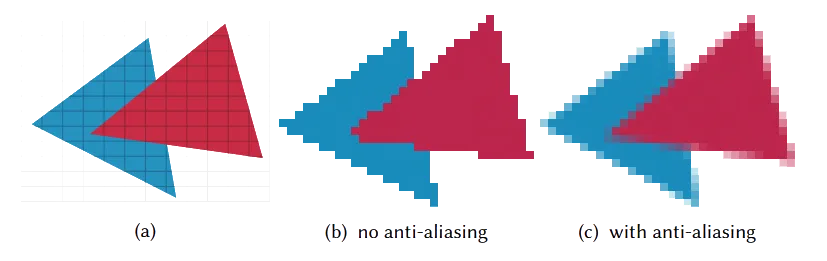
渲染本质上是积分问题,以一个简单的抗锯齿为例,如果每个像素只采样一个点,那么得到的结果就会有很多锯齿(高频噪声)。一个解决方案是套一个低通滤波器,也即对每个像素计算采样中心点附近的一个区域内的积分: $$ I_i(\mathbf\pi) = \iint k(x,y)m(x_i+x, y_i+y; \mathbf\pi)\text{d}x\text{d}y = \iint f(x, y; \mathbf\pi)\text{d}x\text{d}y $$ 其中 \(k\) 是卷积核,\(m\) 是连续的像空间,\(I\) 是离散的图片。实际渲染中,渲染器一般采用以下方法(即我们熟悉的「多重采样抗锯齿 MSAA」)来数值近似这个积分: $$ \iint f(x, y; \mathbf\pi)\text{d}x\text{d}y \approx \frac{1}{N}\sum_{j=1}^N f(x_j, y_j; \pi) $$ 这个数值积分可以解决积分的计算,但是不能解决积分的微分问题: $$ \frac{\partial}{\partial \pi_v}\iint f(x, y; \mathbf\pi)\text{d}x\text{d}y \not\approx \frac{1}{N}\sum_{j=1}^N \frac{\partial}{\partial \pi_v}f(x_j, y_j; \mathbf\pi) = 0 $$
为什么离散采样的微分一定是 0?
\(f(x_j, y_j; \mathbf\pi)\) 的值就是「这个点打到的物体的颜色」,如果 \(\pi_v\) 改变后它打到的三角形不变,那么梯度必然是 0;如果正好跨过边界那么梯度理论上是无穷大——但是离散采样采到边界的概率是 0,因此可以不用管这一项。
因为微分本质上是考察局部变化,而离散的采样对局部变化不敏感,因此对离散采样的数值积分直接微分是不可行的。考察一个更简单的例子: $$ \frac{\partial}{\partial p}\int_0^1(x < p\ ?\ 1:0) \text{d}x $$ 离散采样一定是 0,而实际结果是 1(因为后面这个积分就是 \(p\)).
如何实现这个积分的微分?
计算离散的一元函数的积分的微分,可以先将其所有的间断点列出来,然后分别计算连续部分和间断点的微分.
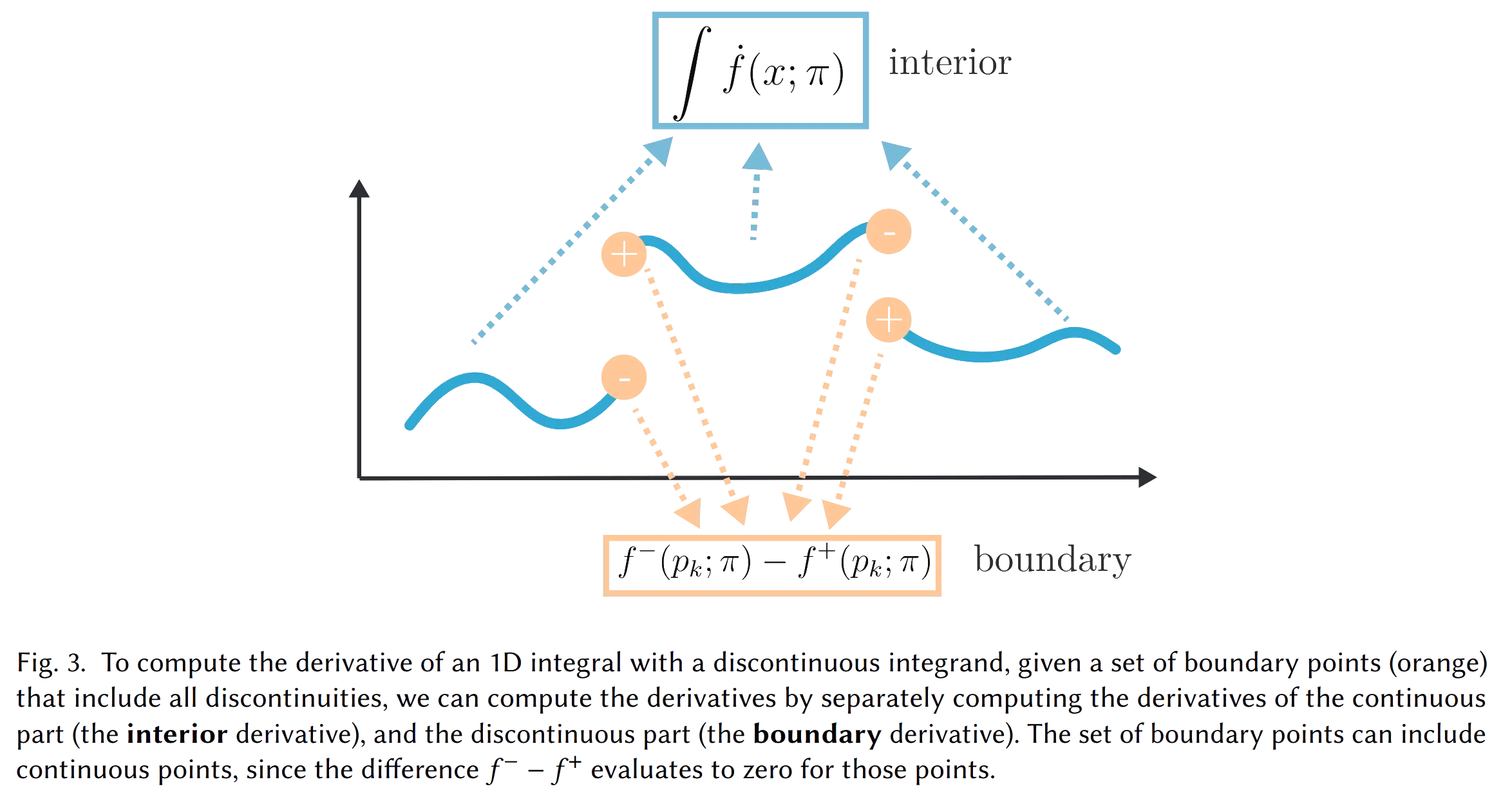
例如对于上面的积分 $$ \frac{\partial}{\partial p}\int_0^1(x < p\ ?\ 1:0) \text{d}x = \frac{\partial}{\partial p}\int_0^p 1\text{d}x + \frac{\partial}{\partial p}\int_p^1 0\text{d}x $$ 然后再分别计算就可以了,一般地则有 $$ \frac{\partial}{\partial\pi}\int_{a(\pi)}^{b(\pi)}f(x;\mathbf\pi)\text{d}x=\int_{a(\pi)}^{b(\pi)}\frac{\partial}{\partial\pi}f(x;\mathbf\pi)\text{d}x + \left[\frac{\partial b(\pi)}{\partial\pi}f(b(\pi); \mathbf\pi) - \frac{\partial a(\pi)}{\partial\pi}f(a(\pi); \mathbf\pi)\right] $$ 前者为内部项,后者为边界上的补偿
推广到高维……
令 \(f\) 是定义在 \(n\) 维流形 \(\Omega(\pi)\) 上的函数,\(\Gamma(\pi) \subset \Omega(\pi)\) 是一个 \(n-1\) 维流形,包含 \(\Omega(\pi)\) 的外部边界 \(\partial\Omega(\pi)\) 和 \(\Omega(\pi)\) 内部的不同区域间的边界,那么对 \(f\) 在 \(\Omega(\pi)\) 上积分的微分可以表示为: $$ \frac{\partial}{\partial\pi}\left(\int_\Omega f\text{d}\Omega\right) = \int_\Omega\dot f \text{d}\Omega + \int_\Gamma\left\langle\mathbf{n}, \dot x\right\rangle \Delta f\text{d}\Gamma $$ 其中 $$ \dot f = \frac{\partial f}{\partial\pi} $$ $$ \dot x = \frac{\partial x}{\partial\pi} \ $$ $$ \Delta f(x) = \lim_{\epsilon\to0^-}f(x+\epsilon \mathbf n) - \lim_{\epsilon\to0^+}f(x+\epsilon \mathbf n) $$ 此处的 \(\dot x\) 表示随着参数 \(\pi\) 的移动 ,边界的移动方向,而上述积分的两部分可以分别数值积分近似: $$ \int_\Omega\dot f \text{d}\Omega \approx \frac{1}{N_i}\sum_{j=1}^{N_i}\dot f(x_j) $$ $$ \int_\Gamma\left\langle\mathbf{n}, \dot x\right\rangle \Delta f\text{d}\Gamma \approx \frac{1}{N_b}\sum_{j=1}^{N_b}\left\langle\mathbf{n}, \dot x\right\rangle\Delta f(x_j) $$ 因此我们解决了可微渲染的理论问题……